
This page features information on past games and past robot designs. Please feel free to contact us with any questions that you may have.
2006 – The Revolver

Aim High was the name of the game in 2006. During autonomous mode, robots scored into any of three goals: one high goal, and two low goals. The highest scoring robot during this period gained bonus points and was placed in defense for the next round. In the second and third rounds, the alliances switched to either offense or defense. At the start of round 4, an alliance could score into goals for game points. Bonus points could be earned in the endgame by placing its three alliance robots on a platform.
The Revolver made it to semifinals at the Boilermaker regional. It was designed to pick up balls and score into high and low goals, which the shooter pivoted to aim into.
2007 – Mantis

The goal of Rack ‘n Roll was to take inner-tube shaped game pieces onto a octagonal centerpiece off of it to place the pieces on. The centerpiece was placed within the middle of the field in a random position, to increase the difficulty of the autonomous period. In the end game, all of the rules remained the same, except that robots could not enter their opponent’s zone.
Mantis could lift and place inner tubes on racks with a claw used to grip the inner tubes.
2008 – Thaddeus

Overdrive was the game for this year. The field was divided lengthwise by a fence median to create a track with red and blue zones on either side. The fence was crossed by an overpass marking the red and blue finish lines. The overpass also held the game pieces called “Trackballs.” Robots raced around the track in a counter-clockwise direction while manipulating the trackballs to score points by manipulating the balls in various ways.
Thaddeus was designed to pick up a 4ft ball with a vacuum. We won the Motorola Creativity Award because our vacuum was actually a cleverly used cake cover.
2009 – μ (Mu)

The goal of the game Lunacy is to score as many of the game pieces in the opposing side’s trailers as possible. Robots could carry “empty cells” from the midfield to the corner of the field, to change them into “super cells”, thus increasing their scoring value. All robots had to operate using un-modifiable wheels designed to reduce traction.
Mu was designed to pick up “moon rocks” and shoot them into opposing trailers after traveling up the belt system inside.
2010 – Scorpion

Breakaway was the name of the game in 2010. Robots had to score soccer balls into goals that were located at the corners of the field. Human players were responsible for resetting the field while the game was going on. At the end of the round, robots attempted to suspend themselves on the two towers located mid-field, and extra bonus points were awarded if they are suspended from another robot.
Scorpion could have gone up against Pelé with its high precision kicker. Their hanging design was also unique with its claw grip and “fishing reel” like mechanism. Everyone remembers the bot that talks, so each match we put a unique sign on the bottom of our robot to display some words of encouragement or even just to say sup to Dean Kamen.
2011 – Sampson, Destroyer of Worlds (Minibot: He-man, Master of The Universe)
In this years game, Logomotion, the robots hung FIRST-logo-component-shaped inner tubes onto a wall of pegs that were (six-feet high). This game was unique because the endgame required robots to be able to release and attach a minibot onto a pole. The minibot then had to climb to the top without any assistance from the drivers or the main robot.
Sampson featured a claw design that had rollers that grabbed the inner tubes. A jackscrew design moved the arm up and down to be able to pick up from the ground and score on the top row of pegs.
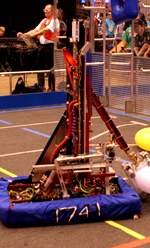
2012 – Swish

This year’s game was called Rebound Rumble, where robots would shoot a small foam basketball into a high, mid, or low goal. Robots could cross the field by driving over a barrier or crossing a bridge. The endgame involved balancing on the bridge either by itself or with one or two other robots for game-changing points.
Swish was unique in that he featured an octacanum design. Swish also had a pneumatic controlled “axe” that acted as a battering ram to force the bridge to come down. Swish utilized a belt intake system.
2013 – Whizbee
In Ultimate Ascent, the goal of the game was to fling disks into a low, medium, or high goal. At the end of the round, robots would attempt to climb up a nine feet tall, three-tier pyramid and hang for points. Human players could feed disks through slots in the field, where robots could catch and load them.
Whizbee was a short, and efficient robot that functioned using the same wheel design as last years wheels designed for control. Whizbee had a tray that served to assist in loading disks from human players into a central cylinder, where up to four disks could be stored, and at the bottom of the cylinder, fired by several sets of spinning wheels, with a mouthpiece that assisted in aiming the disks.
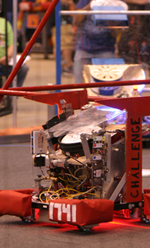
2014 – Jaws
Jaws was built for the 2014 game Aerial Assist, where the goal was to put two foot diameter balls into either a high or low goal, and to throw the ball over a truss that crossed over the center of the field, with a focus on passing to team mates, which gained a large amount of bonus points for the alliance. Only one ball per alliance was allowed on the field at once, and once a ball was scored, human players could toss balls to their team in order to replace it.
Jaws was a robot featuring a cam design with constant force springs to shoot the ball with incredible force, it had the small side effect of being incredibly loud. It used a eight wheels in fixed positions as well as a shifting transmission system to move around quickly and have power when needed. A pneumatic collection system was attached to the back of the robot to ready the robot for firing.
2015 – A.N.D.Y
A.N.D.Y. was a robot built for the 2015 game Recycle Rush. The goal of the game was to stack totes 6 high, and “cap” them with recycling containers. A.N.D.Y. was able to build 5 tall stacks and cap any height stack using its main feature, the claw. Working with other teams, A.N.D.Y. could easily score a maximum of 42 points per stack.
A.N.D.Y. featured a mecanum drive that was able to traverse the field with ease and high maneuverability around stacks. It’s stacker featured a U-shaped internal stacking system with a “plastic magnet”. It held every tote individually to prevent the totes from coming out of the robot. Its highlighted feature is known as the claw. It was able to pick up recycling containers from any position and place them on stacks our alliance created.
2016 – Knight Fury
Knight Fury was built for the 2016 game FIRST® STRONGHOLD℠. The goal of the game was to attack the enemy’s stronghold and cause their castles defense to drop to zero. To attain this goal each team was given ten inch foam balls that they would either launch into a six foot goal or for 5 points or push into a goal on the ground for 2 points. Knight Fury also had to be able to pass the other teams defense and avoid other robots. Defenses ranged from rough terrain to doors and draw bridges to gates. Bonus points were given to any robot’s team if it was on one of the three platforms by the castle or had climbed the castle wall at least halfway.
Knight Fury featured a eight wheeled coast tank drive with a ‘Y’ shaped shooter that would use a fly wheel intake system to pick up foam balls. Once a foam ball was loaded into the shooter, a 122 pound spring was then pulled back by a cam actuated radial extension, also called a choo-choo. This allowed the robot gain the force it needed to launch the foam ball six feet into the air. For bypassing defenses, a three joint manipulation arm was used. Knight Fury’s highlighted feature was how effectively it crossed the terrain defenses.
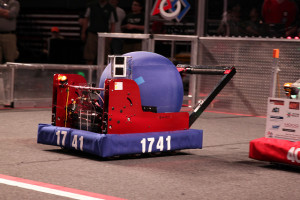
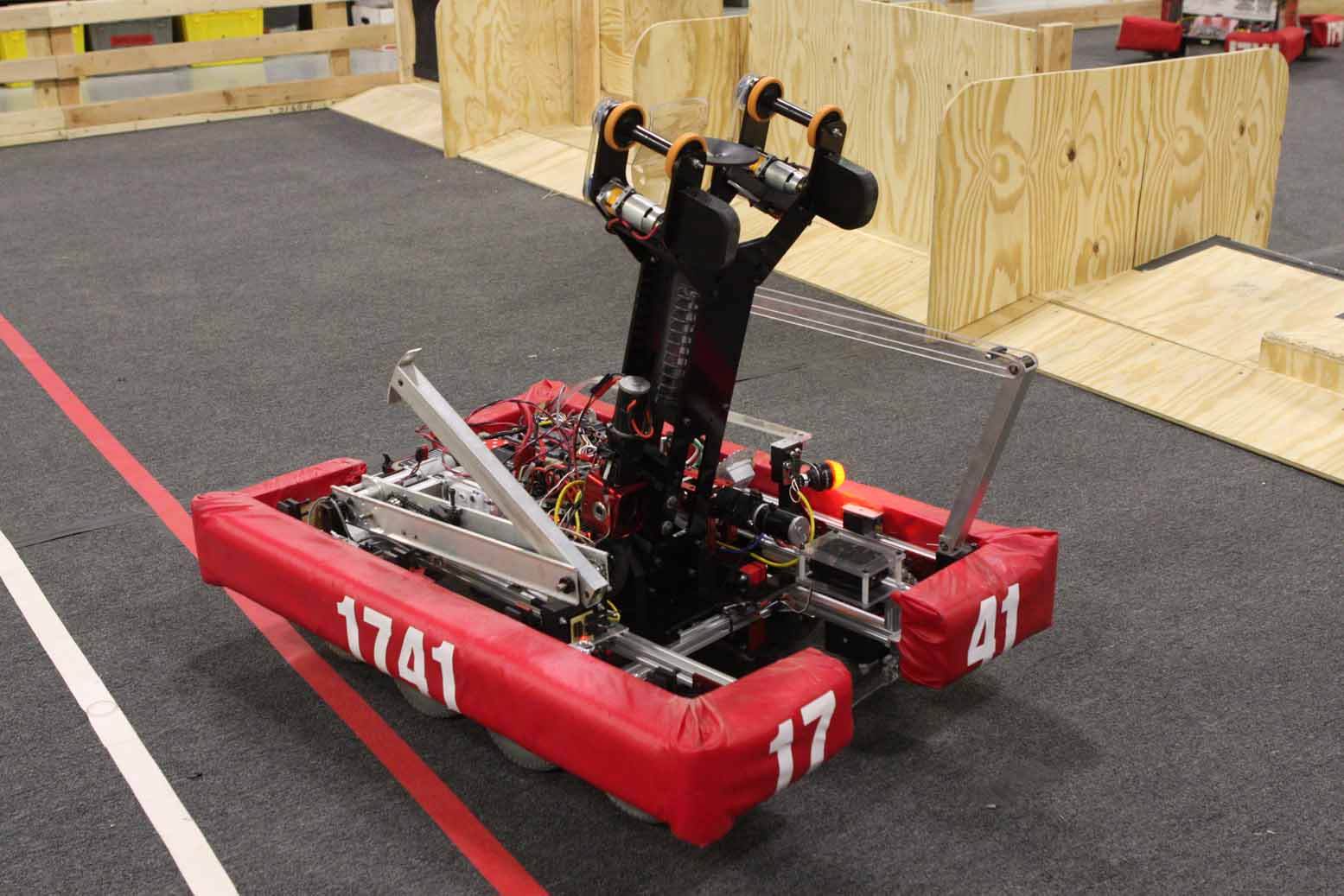
2017 – Black Widow

FIRST® STEAMWORKS℠ featured massive airships with multiple rotors that spun based upon the number of gear the airship received. The more gear delivered, the more rotors spun, the more points teams received. Additionally, teams could score points by shooting bright yellow, wiffle-like balls into either an 8-foot-high boiler or a 1.5-foot-high lower efficiency goal. The former awarding 1/3 of a point per ball scored and the latter giving 1/9 of a point per goal. In the last 20 seconds teams had to climb a rope and hit a touch-pad to receive 50 points. Because of the massive point value received from climbing, these last few seconds were some of the most intense moments of any robotics competition.
Black Widow featured a 4-wheel swerve drive, pneumatic gear manipulator, and a flywheel shooting system. During autonomous the rotary feeding mechanism stylishly fed the shooter balls which were rapidly launched via flywheel system into the high goal. When the driver took over, our swerve drive gave him the freedom to spin around obstacles effortlessly and reach the human player station with ease. Once a gear was loaded in the robot, it was a quick trip back to the airship where the manipulator made short work of accurately dispensing the gear onto a peg. Our powerful climber allowed us to finish strong by grasping the rope and whizzing to the top in an average of 2.5 seconds.
2018 – Otariinae
Otariinae was built for the 2018 game, FIRST® POWER UP℠. POWER UP℠ had an 8-bit classic video game theme. The game featured a large balancing scale and two switches, all with the goal of getting them to tip in your direction by stacking covered milk crates called “power cubes” onto their bases. Gaining ownership of the scale or switches would earn your alliance +1 point per second each. The power cubes could also be used to earn power-ups, giving the alliance a temporary advantage during the match. During the endgame of the match, robots could earn additional points by climbing up the side end of the scale to “defeat the boss”.
Otariinae featured a six wheeled tank drive with a power take-off gearbox and a three stage lift that had a grabber to pick up the cubes and could be used to climb. During competition, Otariinae could grab cubes and drop them into the vault, switch, or the scale using its three stage lift. Its lift gave it the ability to reach any height a cube needed to reach. During end game, its lift also doubled as a climbing system using hooks to latch onto the climbing rungs. The power take-off gearboxes would shift to add extra power to the lift and enable the lift to pull the robot up.
2019 – Kuiper
Kuiper was built for the 2019 game, DESTINATION: DEEP SPACE Presented by The Boeing Company. The game honored the 50th anniversary of the moon landing and was a space theme with the field being on planet “Primus”. Primus consisted of four rocket ships, two cargo bays, and a habitat platform. The game elements were “cargo” and “hatch panels”. Hatch panels were nineteen inch discs that could be attached
 to the sides of the cargo bays or rocket ships via velcro. Cargo were inflated balls that could then be placed into the cargo bays and rocket ships after a hatch panel is placed. Both of these actions earned points.
to the sides of the cargo bays or rocket ships via velcro. Cargo were inflated balls that could then be placed into the cargo bays and rocket ships after a hatch panel is placed. Both of these actions earned points.
During the end of the match, robots could lift themselves off of the ground onto the elevated habitat. Robots that were fully supported by either two of the habitat levels at the end of the match would earn extra points.
Kuiper featured a six-wheeled tank drive, a level one hatch grabber, a cargo system for the cargo bay, and onto the second level of the habitat. During competition, Kuiper was a great defensive robot, but still could do level one hatch and the cargo bay. With the west coast tank drive, it gave us the ability to push almost any robot. During end game, the pneumatic lift would push up the front of the robot, drive forward, and then lift up the back wheels placing the robot onto the level two hab.